Está bien, ya que parece que hay un empate tiraremos entonces por la calle de en medio. Ni una cosa ni la otra.

Antes de seguir con los barquitos vamos a profundizar (nunca mejor dicho) en los complejos problemas que plantea la guerra antisubmarina, ya que ésta no puede abordarse seriamente sin un mínimo conocimiento de la naturaleza peculiar de los océanos.
Velocidad del sonido bajo el agua
El océano es prácticamente opaco a la mayor parte de formas de energía radiante, pero por fortuna hay una excepción:
la energía acústica, que puede viajar a grandes distancias bajo el agua. La velocidad exacta a la que se desplaza el sonido en el medio líquido depende de la combinación de una serie de circunstancias, tales como la temperatura, la presión, la salinidad, etc. Pero la media puede calcularse en unos
1.450 metros por segundo, lo que significa que en el agua el sonido se desplaza unas cuatro veces más rápidamente que en el aire, donde lo hace aproximadamente a unos 350 metros por segundo.
Puesto que el sonido puede transmitirse bajo el agua, un receptor sensible detectará el retorno de cualquier eco que se produzca al chocar las ondas sonoras con objetos sólidos. Por desgracia, la ciencia del sonar no es ni mucho menos sencilla, y la detección de un
eco es simplemente el comienzo de un laborioso mediante el que se intenta decidir dónde se encuentra exactamente el cuerpo que refleja el sonido y de qué podría tratarse. Numerosos factores influyen a lo largo de este proceso.
Los océanos constituyen el más complejo entorno, con una naturaleza dinámica equivalente, en algunos aspecto, al tiempo meteorológico en la atmósfera, cuya naturaleza es difícil de predecir. Estos problemas se deben en buena parte al gigantesco tamaño de los océanos, a la escasez de recursos que hasta ahora se han encontrado y, por último, a las dificultades de examinarlo en detalle.
En efecto, el ojo humano tan sólo puede apreciar una serie limitada de fenómenos oceánicos, tales como la actividad de las olas en la superficie, los hielos, los efectos de las corrientes, las mareas, la meteorología local, etc. La principal diferencia del mar con las superficies cubiertas con agua dulce es que en las aguas del primero existen disueltos numerosos componentes químicos además de, por supuesto,
la sal (cloruro sódico). La segunda diferencia conocida es la de su mayor profundidad y el correspondiente incremento de
presión. Sin embargo, hay otros muchos factores, tales como las variaciones de la salinidad, variaciones de la temperatura, corrientes submarinas, contracorrientes y olas, los efectos de la topografía y naturaleza del fondo marino y la existencia de macro y micro organismos. Todos estos fenómenos influyen, a su vez, en las propiedades ópticas y acústicas del medio.
Uno de los principales factores que ha de tenerse en cuenta en la guerra antisubmarina es la estructura de la
temperatura del mar. Las radiaciones solares calientan la superficie del océano hasta una profundidad que varía, lógicamente, con la latitud. Paulatinamente, y en sucesivos estratos, la temperatura va descendiendo a medida que aumenta la profundidad. La profundidad a la que se encuentran las líneas de variación térmica permanentes (también denominada
termoclina) oscilan entre los 300 y 400 metros en las áreas tropicales y entre los 500 y los 1.000 en las áreas subtropicales. También existen líneas de variación térmica estacionales se incluso, en algunas áreas, diferencias térmicas diarias.
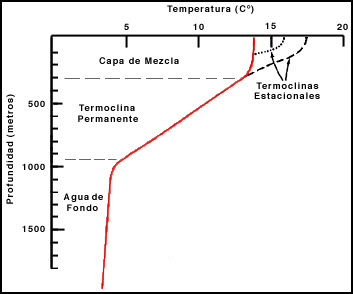
La capa térmica separa aguas de densidad ligeramente diferente. También se concentran en esa línea numerosas cantidades de partículas orgánicas e inorgánicas que carecen de energía suficiente para caer a mayor profundidad. Las sustancias inorgánicas incluyen el material depositado tanto deliberada como naturalmente desde la tierra, productos de erosión de los continentes y del mismo lecho marino y desperdicios en general. Las sustancias orgánicas en esa línea corresponden principalmente a plancton que atrae a los peces y los crustáceos.
La capa térmica tiene una gran importancia en la guerra antisubmarina, puesto que afecta a la velocidad del sonido, que alcanza su mínimo en la capa térmica permanente. Este estrato de velocidad mínima, conocido como canal de profundidad sónica, tiene diversos efectos, uno de los cuales es que una señal del sonido puede viajar por ella hasta una distancia de 1.000 kilómetros de la fuente emisora.
La influencia de este efecto de estratificación y las variaciones continuas de velocidad del sonido debido a la profundidad hacen que las sendas de las ondas sónicas no sean líneas rectas, sino arcos de círculos, según la
ley de Snell. Dicha ley física se descubrió en relación a los rayos de luz, pero es igualmente aplicable a las ondas de sonido en el agua. El efecto Snell consiste en que cuando una onda sónica pasa de un estrato a otro de diferente densidad, sufre un efecto de curvatura.
Por otra parte, las ondas de sonido se dispersan en el medio oceánico, hasta la superficie y hasta el fondo lo cual, combinado con las trayectorias circulares, produce una convergencia del sonido que deja amplias zonas de océano sin ser afectadas por la emisión sonora. Este fenómeno, conocido como “
zona de convergencia”, es prácticamente indiferente a la intensidad de la potencia con que opere la fuente emisora. Un submarino que se encontrase en dicha zona no sería detectado aunque estuviese muy próximo al sonar enemigo. Debido a este efecto se perdieron numerosos barcos durante la
Segunda Guerra Mundial.
El perfil de la transmisión y la longitud de la zona de convergencia también se ven influenciados por la profundidad de la columna de agua de la fuente acústica y del receptor. En aguas poco profundas, el tipo del fondo del océano y su topografía, pueden afectar a la calidad de la señal, puesto que así como un fondo rocoso ofrece una buena reflexión, el limo y la arena la atenúan considerablemente.
En la profundidad del mar puede advertirse un estrato de dispersión sónica que refleja las ondas de sonido. Está formado por un grueso estrato y tres subestratos compuestos por fotoplacton y zooplacton microscópico. No obstante, su exacta composición, su grosor y la profundidad a la que se encuentra varía de área en área e incluso de estación a estación. Las ondas sonoras proyectadas verticalmente, o casi generalmente, atraviesan dicho estrato. Por el contrario, las ondas proyectadas horizontalmente o casi son refractadas y dispersadas. Los efectos de este estrato dispersor pueden superarse optimizando la relación de frecuencia, longitud de onda y potencia emisora, pero a menudo el operador del sonar antisubmarino no tiene más remedio que recurrir a los métodos pasivos.
Salinidad media
La media de concentración salina en el océano abierto es de 34,5 partes por 1.000 y varía normalmente entre 32 y 37 por 1.000. Estas oscilaciones se deben a una serie de factores concurrentes: evaporación, formación de hielo en la superficie, efectos de dilución producidos por la lluvia, desembocadura de los ríos o el hielo al derretirse, etc.
Estos
cambios de salinidad afectan a la velocidad del sonido en el agua. En concreto, por cada 1 por 1.000 de variación en la salinidad se produce una modificación de 1,31 metros por segundo en la velocidad. La salinidad es uno de los factores menos significativos de entre todos aquellos que afectan a la propagación del sonido en el agua, pero operativamente tiene importancia allí donde, combinada con el factor temperatura, puede producir unas notables refracciones de la energía sonora así como importantes turbulencias subacuáticas.
Cuando el fondo del océano ofrece irregularidades suficientemente importantes, un submarino puede encontrar refugio en las denominadas “
sombras de las colinas”. Es obvio que cuanto más se conoce sobre el lecho del océano, más partido pueden obtener los submarinos de dicha información. Para un submarinista el conocimiento de la topografía del fondo del océano es, por supuesto, más que una útil información para poder esconderse del sonar enemigo. Para él el conocimiento de la plataforma continental resulta imprescindible y es una cuestión de supervivencia, ya que ha de deslizarse sobre la misma para alcanzar las profundidades del océano donde se encuentran sus zonas de patrulla.
El problema del ruido en un submarino
Un submarino en inmersión se caracteriza por una serie de propiedades que lo hacen susceptible de ser detectado. La primera es que el propio submarino produce
ruido debido a la actividad de sus motores y en parte debido a su deslizamiento por el agua. El ruido de la maquinaria proviene del desequilibrio de sus partes móviles, tales como las aspas de las hélices, la transmisión y las bombas.
La mayor parte de los submarinos tienen en la actualidad tan sólo una planta propulsora, aunque algunos viejos
SSN soviéticos, y todos sus submarinos armados con misiles balísticos tienen dos. Los ruidos de propulsión tienen su origen fundamentalmente en el fenómeno conocido como
cavitación producido por el vértice de las hélices, donde la acumulación de burbujas de aire produce un zumbido característico. Este ruido de propulsión se propaga fundamentalmente a lo largo de un plano horizontal, y es mayor en la dirección hacia las hélices, es decir, por la popa del submarino. El ruido varía, como es lógico, con el régimen de revoluciones de los motores, y resulta mayor a medida que se producen aceleraciones, sostenimiento de alta velocidad o cambios bruscos de rumbo. A velocidades menores el ruido de propulsión se modula la frecuencia natural de las hélices hasta producir un sonido característico que podría permitir incluso reconocer a cada unos de los submarinos individualmente. La costumbre soviética de utilizar dos plantas propulsoras produce sonidos adicionales de interrelación entre ambas hélices, lo que constituye una ayuda más para su identificación.
Otro factor es el ruido hidrodinámico que se produce a consecuencia del
deslizamiento del agua marina a la largo del caso del submarino. Resulta mayor a medida que el caso exterior dispone de más protuberancias y orificios. Desde siempre, los submarino soviéticos han sido mucho más ruidosos en este aspecto que los occidentales debido al uso continuado de orificios para la inundación de los tanques de lastre.
Un submarino sumergido que se encuentre en movimiento deja también una
estela, cuyo rastro puede ser detectado mediante instrumentos de sonar activo. Además, la turbulencia de forma cónica, alcanza a veces la superficie a cierta distancia por la popa del submarino, ocasionando variaciones en el ritmo del oleaje que impere en ese momento.
Por otra parte, según la profundidad a la que navegue el submarino y las condiciones oceánicas predominantes, cabe también la posibilidad de que la estela de turbulencia salga a la
superficie debido a que temperatura es superior a la de las aguas circundantes. Una vez en la superficie, el agua más caliente de la estela se mezcla con la más templada de la superficie, produciendo una variación de temperatura que puede ser detectada tanto por los sensores de infrarrojos montados en los satélites, como equipos similares instalados a bordo de aviones de lucha antisubmarina.
Cuando un submarino navega por aguas poco profundas se produce una ligerísima, pero, sin embargo, perceptible
elevación de la superficie del agua justo encima del casco. Estas elevaciones son potencialmente detectables por satélites del tipo “
Seasat” norteamericano (lanzado en 1978), el cual dispone un radioaltímetro con una resolución vertical de 10 cm.
También puede localizarse la posición de un submarino en función de los
campos eléctricos y magnéticos que genera. Según el autor soviético V. Nikyaylin, en el artículo “
Física y defensa antisubmarina”, publicado el 10 de marzo de 1962, en el casco de un submarino tienen lugar variaciones del potencial eléctrico y una corriente eléctrica que fluye entre esos niveles de diferencia, utilizando el agua como conductor. La media de la oscilación de los campos eléctricos y electromagnéticos resultantes puede detectarse mediante la utilización de varios sensores extremadamente sensibles. Un procedimiento de detección podría ser el depositar largos cables eléctricos en el fondo del océano.
 El sistema SOSUS
El sistema SOSUS
El principal detector acústico pasivo es el hidrófono, que consiste básicamente en un aparato de escucha muy sensible capaz de recoger los ruidos existentes en el océano. Lógicamente, el diseño de los hidrófonos está concebido de tal manera que los ruidos cuya recepción sea más nítida coincida precisamente con los más característicos de los submarinos. Estos ingenios pasivos están desplegados de forma estática en el lecho del océano, en sonoboyas o bien en el casco de los buques de superficie (aunque en este último caso su efectividad está condicionada por la velocidad del buque).
Un ejemplo típico de detector pasivo oceánico es el sistema norteamericano denominado
SOSUS (
Sound Surveillance System), o sistema de vigilancia sónica, que consiste en el despliegue de unas cadenas de hidrófonos sobre el lecho de los océanos Atlántico y Pacífico.
Inicialmente, el sistema
SOSUS se diseñó para detectar el paso de los submarinos soviéticos armados con misiles balísticos en los días en que el alcance de dichos misiles era corto y obligaba a los submarinos soviéticos a aproximarse a las costas norteamericanas para poder estar a distancia suficiente como para constituir una amenaza real. El ejemplo más claro de esto lo tenemos en la vigilancia establecida por la
OTAN en la
Brecha GIUK y que afectará enormemente en el desarrollo del primer escenario de la campaña
Northern Inferno.

Ahora, sin embargo, parecería que la utilidad del
SOSUS se ha reducido considerablemente puesto que los nuevos submarinos soviéticos armados con misiles balísticos pueden alcanzar el territorio continental de los Estados Unidos sin abandonar sus propios mares. De todas formas, el sistema
SOSUS, gracias a la utilización de sensores cada vez más mejorados, ha logrado extender sus prestaciones a una distancia sumamente amplia y está considerado como un equipo dotado de sensibilidad más que notable, hasta el punto de que se sabe que ha sido capaz de detectar el paso de los submarinos soviéticos a una distancia de varios cientos de kilómetros.
¡In SOSUS we trust!
Pese a todo, con los dispositivos tipo
SOSUS se consigue poco más que certificar la presencia de un submarino a gran distancia, así como su rumbo aproximado. Algunas fuentes solventes afirman que el
SOSUS puede localizar con precisión a un submarino situado en un radio de 15 kilómetros, con lo que facilita sustancialmente la tarea de ataque a las correspondientes unidades (por ejemplo, un avión antisubmarino), que cuentan ya con el conocimiento exacto de la posición de su objetivo.
El tema del contacto pasivo de largo alcance es de sumo interés. Considérese, por ejemplo, el caso de un submarino que se mueve a una velocidad de 25 nudos (algo más de 43 km/hora) y que ha sido localizado por el detector de largo alcance a una distancia de 100 millas náuticas (unos 185 km). Puesto que la velocidad del sonido en el mar es aproximadamente de 1.450 m/seg., el ruido producido por el submarino tardará unos ciento once segundos segundos en llegar hasta el detector, tiempo en que el submarino habrá podido desplazarse 1,43 km si mantiene su velocidad, lo cual no es moco de pavo.
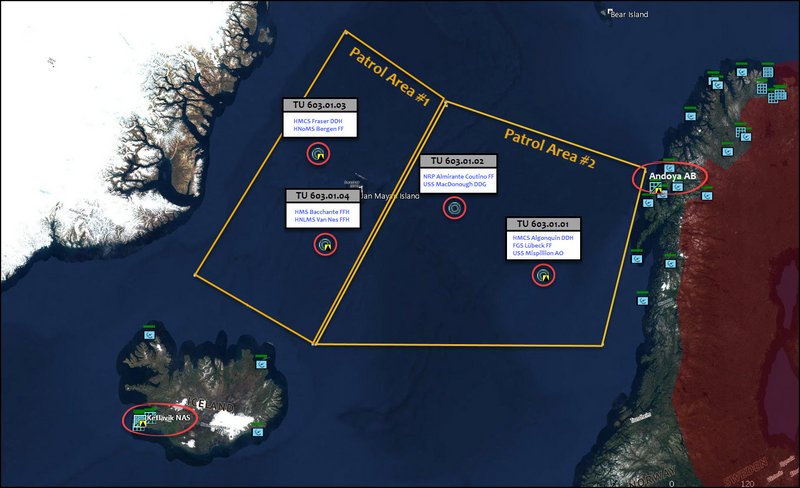
Y hasta aquí por hoy. En siguiente mensaje tocará abordar en detalle, ya no lo puedo demorar más, el
Orden de Batalla y las capacidades
ASW de los buques de guerra de la
OTAN que se encuentran bloqueando el paso a los submarinos soviéticos en la
Brecha GIUK.
¡Corred, insensatos!